Motor Control
1. 운동조절을 연구하는 이유와 정의
예전의 치료사들은 움직임의 신경조절에 대한 이해와 어떻게 움직임패턴(movement pattern)이나 운동행위(motor development)가 학습되는지, 그리고 건강한 이들의 운동행위가 생애에 걸쳐 어떻게 변화해 가는지를 알고 싶어하며, 중재 이후에는 신경가소성 이론들이 어떻게 영향을 받는가에 대한 것을 알고자 했다. 전형적인 운동행위에 대한 틀을 잡기 위해서는 신경학적 기능 장애를 가진 이들의 운동행위가 어떻게 변화하는지 그리고 신경계 가변성이 변화를 만드는데 어떻게 상호작용하는지에 대한 이해가 필수적이다.
한편 치료사는 기능적 운동장애를 일으키는 운동조절 문제가 있는 환자를 재훈련하는 데에 상당히 많은 시간을 보내며, 움직임 장애의 평가와 치료는 정상 운동조절의 신경기반(neural basis)과 손상된 움직임의 병태생리학에 대한 지식을 포함하는 수많은 요인에 의해 좌우된다. 그리고 평가와 치료전략은 움직임 장애에 대한 신경기반에 관한 현재의 지식과 일치되어야 한다. 또한, 치료전략은 기능에 필수적인 자세와 움직임의 질과 양을 개선하도록 설계되어 있다. 이와 같이, 운동조절 특히 정상과 비정상적인 움직임 양쪽의 본질과 조절을 이해하는 것은 임상진료에서 중요하다고 하겠다.

아래는 여러 저서에서 발췌한 Motor control의 정의이다.
- 움직임에 필수적인 기전을 조정하거나 통제하는 능력
- 움직임이 어떻게 생성되고 조절되는가에 대한 기전
- 개개인이 어떠한 운동과제를 수행하기 위해서 자신의 행동을 조절하고 협응하는 기전(Farber, 1993)
- 자세조절(postural control)과 균형조절(balance control) 그리고 수의적인 운동조절(voluntary control)에 대한 연구
- 자세와 움직임 조절에 대한 연구
- 중추신경계가 목적한 활동을 하도록 근골격계를 조절하는 능력
- 이미 습득된 움직임을 각 개인들이 어떻게 조절하는가에 대한 연구
운동조절의 이론들을 보기 전에 우리는 먼저 운동조절을 주도하는 움직임에 대한 이해가 필요하다.

1-1. 움직임(movement)의 본질에 대한 이해
1) 움직임(movement) : 개인(Individual), 과제(Task), 환경(Environment)의 상호작용

- Individual : Task를 수행하는 자
- Task : Individual이 하고자 하는 것
- Environment : Individual에 의해 Task가 수행되는 곳
2) 움직임에 영향을 주는 개인적 요인
- 지각(perception), 인지(cognition), 동작(action)

3) 움직임에 영향을 주는 과제(task)
- 안정성(stability), 조작(manipulation), 이동성(mobility)

4) 움직임에 영향을 주는 환경적 요인
- 조절특징, 비조절특징
1-2. 고리 조절 체계(loop control system)
1) 열린 고리 조절 체계(open-loop control system)
- feedback과 비교기(comparator) 없이 움직임 발생
- 투구, 던지기, 사격 등
2) 닫힌 고리 조절 체계(closed-loop control system)
- 움직임으로부터 발생한 feedback이 움직임 계획과 수행에 참여
- 중추신경계는 운동계획만 전달하고 이후 감각 feedback 정보가 확인
- 못 박기, 실을 바늘에 꿰기 등
- 제한점 : 감각입력 전에 선행적으로 발생하는 feedforward를 설명하지 못함
2. 운동조절의 이론(움직임 조절)
- 움직임이 어떻게 조절되는가에 대한 관점을 설명하는 것
- 움직임 조절에 대한 하나의 추상적 관념의 집단
- 이론은 추상적인 것이기 때문에 직접 검증할 수 없다. 오히려 이론이 가설을 만들어내고 이것은 검증이 가능하다. 가설검증을 통해 얻어지는 정보는 하나의 이론을 입증하거나 틀렸음을 입증하기 위해 사용된다. 가설주도의 임상진료는 치료사를 능동적인 문제해결사로 탈바꿈시킨다(Rothstein & Echternach, 1986; Rothstein et al., 2003). 치료과정에서 치료사는 다양한 가설을 검증하여 어떤 가설은 버리고 이들의 결과와 더 일치하는 새로운 가설을 만들어낼 것이다.
1) 반사 이론(reflex theory) : Charles Sherrington(1906)

- 움직임 생성하는데 감각이 필수적이며, 감각입력을 통하여 운동을 수정할 수 있음
- 감각입력은 운동출력(움직임) 위해 필수적
- 매우 복잡한 수의운동(voluntary movement)은 반사들의 성공적인 결합에 의하여 생성
- 감각자극만으로 제뇌동물의 treadmill 보행
※ 반사이론의 한계점
① 탈구심성 동물(감각입력 차단)에서 보행과 같은 협응 운동이 나타남
② 프로그램화되어 있는 선행적 운동조절(anticipatory control)은 반사이론으로 설명 못함
③ feedforward와 feedback의 중요성을 고려하지 않음
※ 미리먹임 조절(feedforward control) : 이전의 운동경험이나 저장된 운동 프로그램에 기초하여 형성
④ 감각자극이 없을 때에 일어나는 움직임을 적절히 설명하고 예측하지 못함
⑤ 빠른 움직임을 설명하지 못함. 경험이 많고 능숙한 타이피스트가 하나의 키에서 그 다음의 키로 너무나도 빨리 옮겨가기 때문에 한 타에서 그 다음 타로 넘어가는 동안 감각정보를 받아들일 시간이 없음
⑥ 반사연쇄(chain of reflex)가 복잡한 행동을 만들어낼 수 있다는 개념은, 단일 자극이 전후관계와 내림명령에 의존하는 다양한 반응을 야기할 수 있다는 사실을 설명하지 못함. 즉, 사람은 자신의 의지에 의해서 반사를 무시할 수 있다는 것
⑦ 반사연쇄는 새로운 움직임을 만들어내는 능력을 설명하지 못함
자발적이고 수의적인 움직임이 받아들일 수 있는 행동의 부류로서 인식된다면, 반사는 행동의 기초단위라 생각할 수 없게 된다. 그 이유는 반사는 외부의 인사에 의해서 활성화되어야 하기 때문이다.
2) 수직계층 이론(hierarchical theory) : Hughlings Jackson(1932)

- 운동조절에 있어 중추신경계는 고위중추(수의적 움직임 조절)와 하위중추(반사적 움직임 조절)로 명확히 나뉘어져 있음
- 움직임의 조절은 가장 낮은 단계(low level)인 척수(spinal cord)에서, 중간단계(middle level)들인 뇌줄기(brain sterm)로 그리고 가장 높은 단계(high level)인 대뇌피질(cortex)까지 수직적으로 계층이 나뉘어져 있음
- 고위중추는 하위중추를 조절하는 상명하달식(Top-Down) 조직으로 이루어짐
- 정보의 흐름은 한 방향이며, 복잡한 운동은 중추신경계의 고위수준에서 조절되며, 단순운동(반사)은 하위수준에서 조절됨
※ Motor program
- 정상 움직임은 신경계 내에서 출력되는 근활성 패턴을 일일이 조절하는 운동프로그램(motor program)에 의해 조절
실행을 위해 고위중추기관이 하위중추(중뇌, 뇌줄기, 척수)의 운동프로그램을 선택함
- 운동프로그램은 고위수준에서 저장되며, 이는 움직임 동안 feedback이나 feedforward mechanism에 의해 영향을 받지 않는다고 함
※ 계층조절과 관련된 최신 개념
- 신경계의 각 수준은 과제에 따라 다른 수준(상위수준과 하위수준)에 대해서 작용할 수 있다는 사실을 신경계가 인식한다.
- 반사는 운동조절의 유일한 결정요인이 아니라 움직임의 발생과 조절에 중요한 많은 과정의 하나라고 생각되고 있다.
※ 계층 이론의 한계점
① 척수 고양이(완전경수손상)에서 보여지는 보행은 하위중추에서 조절함 → 보행의 중추패턴 발생기(Central Pattern Generator)
※ 중추패턴 발생기 : CPG(central pattern generator)
- 운동명령이 CPG에서 발생하여 근육으로 전달
- CPG 움직임은 고위중추의 명령없이도 율동적이고 협응된 움직임을 생산하며, CPG는 척수의 뇌줄기 내에 위치함
② 수의운동과 반사조절 간의 구별이 분명하지 않음
ex) 반사 움직임도 지시에 의해 수정될 수 있음
③ 다른 근활성 패턴들에서 비슷한 운동학적 협응 보임
ex) 여러 부위를 사용하여 글씨 쓰기를 했을 때 비슷하게 쓸 수 있음
④ 계층이론은 정상적인 성인의 어떤 상황에서의 반사행동의 우월성을 설명할 수 없다. 예를 들어 가시를 밟으면 즉각적으로 다리를 움츠리게 되는데 이것은 운동기능을 지배하는 계층의 낮은 단계에서의 반사이다. 따라서 하위수준의 행동은 원시적이고 미숙한 반면 고위수준의 행동은 성숙하고 적절하다는 가정에 대해서 주의해야 한다.

3) 운동 프로그래밍 이론(motor programming theory) : Keele(1968)
- feedback 없이도 움직임이 실행되고, 운동이 발생 되기 전에 운동의 순서가 미리 프로그래밍 되어 준비된다는 이론
- 동물의 날갯짓을 하는 타이밍은 율동적 패턴 발생기(rhythmic pattern generator)에 의존한다. 감각신경이 절단되었어도 감각 입력 없이 신경계 그 자체로 출력할 수 있었다. 이것은 반사행동이 없어도 움직임은 가능하다는 것을 말한다. 감각 입력은 움직임을 야기하는 필수적인 것은 아니지만 운동을 조절하는 데에는 중요한 기능을 하고 있다. 운동 프로그래밍 이론은 앞서 계층이론의 제한점을 설명한다.
※ 운동 프로그래밍 이론의 한계점
① 그래도 feedback은 정밀한 움직임을 위해서 필요함.
② 중추패턴 발생기(CPG)의 개념은 움직임을 조절함에 있어서 감각입력의 중요성에 대한 개념을 대체할 의도는 없으며, 신경계의 유연성에 대한 이해를 단순히 확장한 것이다. 중추 운동 프로그램이 활동을 결정하는 유일한 요소라고 생각할 수 없다는 것이 운동 프로그램 개념의 중요한 한계이다(Bernstein, 1967). 즉, 운동 프로그램 개념은 운동조절을 함에 있어서 신경계가 근골격계와 환경의 변수 양쪽 모두를 다루어야 한다는 것을 고려하고 있지 않다.
4) (동적)시스템 이론(dynamic system theory) : Nicolai Bernstein(1896-1966)
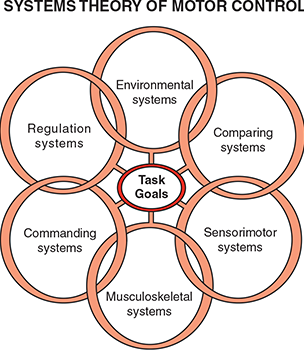
- 움직임들은 말초적으로나 중추적으로 조절되는 것이 아니라, 많은 시스템들의 상호작용한 결과로 나타나는 것
- 움직임 조절에 중추신경계가 매우 중요하나 그 외에도 환경계와 근골격계가 협력하여 주어진 과제 목적(task goal)을 성취함
- 중추신경계 각 부위가 특정한 기능을 수행한다는 뇌의 국재화(localization)를 덜 엄격하게 생각함
- 중추신경계의 다양한 부위들이 수평적으로 운동조절에 참여 즉, 운동조절에 고위단계나 하위단계가 없음
- 신경계는 운동 행동의 마지막 순간(end points)인 과제목표의 성취를 조절하기 위해 서로 협력하여 움직임을 조절함
- 시스템 이론은 운동패턴이나 반사의 유발보다 기능적 과제의 이용을 중요하게 생각하며, task goal은 조절시스템, 명령시스템, 비교시스템, 운동감각계, 근골격계, 환경의 상호작용에 영향을 받음
- Bernstein(1967)은 “움직임의 협응(coordination of movement)은 움직이는 유기체의 불필요한 자유도를 억제하는 과정”이라 하였다. → 즉, 정상적인 움직임은 시스템의 상호작용으로부터 나타나는 움직임 전략(movement strategy)에 의해 협응되는 것이고, 신경계가 조절을 하는 동안 운동의 자유도(degree of freedom)를 제한한다는 것이다.
※ 시스템 이론의 한계점
① 여러 이론들에서 나오는 용어를 쓰고 있기 때문에, 용어와 정의가 명확하지 않음 ex) strategy나 coordination 같은 경우 다른 학문에서 다른 의미를 가지고 있음
② 시스템 이론이 추상적이고 너무 세분화되어 있어서 신경해부학과 연관시키기 어려움
※ 시스템 이론에서 자세조설(postural control)의 개념과 균형(balance)을 위한 감각구성
- 안정성 한계를 벗어나서 움직일 때, 사지에서 보호반응(protective response)이 일어나게 되며 이때 디딤전략 패턴(stepping strategy pattern)이 나타난다.
● 자동적 자세반응(automatic postural response)
① ankle strategy : 움직이는 일반적인 판 위에 서 있는 대상에게 갑작스럽게 판을 뒤쪽으로 움직이면 자세 유지를 위해 전방동요(forward sway, 뒤쪽 근육 사용됨)가, 판을 앞쪽으로 움직이면 후방동요(backward sway, 앞쪽 근육 사용됨)가 일어난다. 이 동요를 보상하기 위해 근육은 자동적으로 distal에서 proximal쪽으로 예측 가능한 순서로 수축을 이룬다.
② hip strategy : 지지면이 좁은 판 위나 지지면이 빠르게 움직일 때, 즉 안정성이 감소되었을 때 신체 동요(body sway)가 일어나지만 이때에는 대퇴에서 일어난다. 이 전략에서 사용되는 근육은 동요되는 신체의 반대쪽에 위치하는 근위쪽 근육(대퇴와 몸통)을 사용한다.
▶ 즉, 기립 자세를 유일하게 조절하는 것이 신경계라기보다는 다양한 하위 시스템들(운동, 감각, 골격)이 균형조절에 관여한다. 그러므로 균형조절(balance control)에 장애가 있는 환자의 치료는 중추신경계의 기능에 초점을 두기보다는 균형조절에 기초가 되는 여러 다양한 시스템에 기초를 두어야 한다.
● 선행적 자세조절(anticipatory postural control)
- 움직임이 일어나기 전 자세 유지 근육들이 선행적으로 활성화되는 것이다.
- 중추신경계는 운동이 일어나기 전 각 부위의 활동 수위를 적절히 준비할 수 있으며 이는 균형조절에 관여한다.
- 자세안정의 결함은 개인이 수행하는 다양한 운동을 감소시킨다.
- 선행적 자세조절은 feedforward postural control을 설명하며, 이들은 모두 열린 고리체계(open-loop control)이다.
● 감각구성
-자세조절은 지남력(orientation)과 균형(평형)을 제공한다. 자세조절이 정상이라면 감각구성을 평가해야 한다.
- 균형조절을 위한 감각구성에는 시각(visual), 체성감각(somatosensory), 전정 감각계(vestibular system)가 있다. 그리고 지남력을 위해 이들 세 가지 감각을 사용한다. 이들 중 한 시스템의 정보가 잘못되었다고 해도 나머지 시스템들을 이용하여 균형조절을 보상할 수 있다.
▶ 실험 : 움직이는 판에서 3가지 감각(시각, 체감각, 전정감각)을 왜곡하거나 제거해 6가지 상황에서 연구
① 눈 뜨고 정상적 표면에서 서기
② 시각 차단하고 정상적 표면에서 서기
③ 시간 혼란을 주고 정상적 표면에서 서기
④ 눈 뜨고 움직이는 판에 서기
⑤ 시각 차단하고 움직이는 판에 서기
⑥ 시간 혼란을 주고 움직이는 판에 서기
- 결과 : 동요(sway) 지수가 갈수록 증가
- 해석 : 시각 입력의 정확성보다, 공간에서의 지지기저면 압력이 정확할 때 동요가 최소화 된다. 이는 균형 유지를 위해서는 시각의 정확성보다 발에서 들어오는 체성감각 정보가 더 중요함을 의미한다.
5) 생태학적 이론(ecological theory) : James Gibson(1960)
- 운동시스템이 목표 지향적인 행동을 수행하기 위해서 환경에 영향을 받는다.
- 동물에게 중요한 것은 감각(sensation)이 아니라 주어진 환경에서의 지각(perception)이다.
※ 생태학적 이론의 한계점
- 신경계의 조직화와 기능에 대한 설명이 부족
3. 신경학적 재활모형
1) 근재교육 모형(muscle reeducation model) : Kenny(1940)
① 치료 목표
- 개별 근육의 작용에 초점
- 최대 근력 강화를 위해 잔여 운동 단위(motor unit)사용
- 이차 합병증과 비효율적 보상패턴을 가지지 않도록 도와줌
- 기능적인 활동 가르침 → 정형적 보조장비 제공
② 한계점
- 중추신경계 환자에 적용 불가능 → 근육 약화보다는 비정상적인 운동패턴이 문제
2) 신경촉진 모형(neurofacilitation model)
: 반사 이론과 수직계층 이론에 근거
: 비정상 움직임 패턴들은 신경계 병변들의 직접적인 결과
: 정상적인 움직임은 중추신경계 내에서 계층적으로 조직화된 일련의 반사로부터 야기됨
▶ (반사에 기초한)신경촉진 접근법의 종류
- Bobath 접근법(1948) : Karel & Berta Bobath
- Rood 접근법(1950) : Margaret Rood
- PNF(1954) : Dr. Herman Kabat & Margaret Knott, Dorothy Voss 등
- Brunnstrom 접근법(1962) : Signe Brunnstrom
- 감각통합치료법(1972) : Jean Ayres
① 치료 목표
- 고유감각 입력 통해 정상 운동패턴 촉진하고 비정상적인 근긴장도와 원시반사들을 억제
- 중추신경계가 비정상적인 운동패턴들을 학습하지 못하도록 함
② 한계점
- 고립된 움직임 패턴 훈련으로 환자에게 기능적인 활동에 대한 이해를 시키기 힘듦
- 환자들은 자발적이기 보다 치료사에 의해 수동적으로 참여
- 근골격계와 환경의 복합적인 작용을 고려하지 않고 치료의 목표를 오로지 신경계에만 두었음
- 비정상적인 근긴장도와 원시반사들을 억제하여도 정상 움직임 패턴들이 자동적으로 나타나지 않았음
3) 과제지향 모형(task-oriented model)
: 중추신경계, 말초신경계 모두를 치료 목표로 한다.
: 정상적인 움직임은 서로 다른 시스템의 상호작용으로 나타나며, 움직임은 행동목표를 중심으로 조직화되고 환경에 의해서 제약을 받는다.
: 비정상 운동조절은 움직임의 문제가 움직임을 조절하는 하나 이상의 시스템 장애에 기인한다고 본다.
① 치료 목표
- 기능적인 과제 목적들을 성취하도록 한다. ex) 걷기, 의자에서 일어나기 등
- 다양한 환경과 상황에서의 훈련을 통해 운동 문제를 해결하도록 하며, 적응
성을 증가시킨다.
- 효율적인 보상전략들을 발달시키고, 비효율적이고 비능률적인 전략들을 버리
도록 한다.
② 한계점
- 운동 행동의 효과적이고 효율적인 보상전략의 양적 측정이 어렵다.
- 치료사의 직접 손의 사용이 적고, 환자들에게 인지적인 정보 제공을 강조한다.
4. 임상에서 적용되어야 할 운동조절의 개념
1) 행동목적(behavioral goals)
- 성공적인 어떤 동작을 하기 위해서 치료사는 환자가 목적을 의식적으로 깨달을
수 있도록 도움이 될 만한 적절한 정보를 제공해야 한다.
2) 정상적인 운동전략(normal movement strategy)
- 과제를 수행하기 위해, 조절에 필요한 신경계의 필수적인 요소들과 이 조절을 방해하는 장벽의 종류를 앎으로써 치료사는 어떻게 정상적인 운동전략을 나타나게 할 것인지 아니면 대체 운동전략을 세울 것인지를 판단해야 한다.
3) 보상전략(compensatory strategy)
- 신경계의 일차적 손상으로 인한 신경학적 장애를 가진 환자는 비정상적인 운동전략 양상을 사용하여 움직임을 보상한다.
- 치료사들은 환자에게 가장 효과적이고 효율적인 보상 운동전략을 가르쳐야 하는지 아니면, 보조기와 같은 생체역학적 장비를 주어야 하는지를 결정할 때, 이와 같은 치료 방법이 기능과 운동의 질을 증가시킬 수 있는지 고려해야 한다.
4) 근골격계 구속(musculoskeletal constraints)
- 신경계 환자들에서 신경계 문제보다 근골격계 문제로 인한 운동 제한이 어느 정도 되는지 고려해야 한다.
5) 환경 적응(environmental adaptation)
- 환경은 운동전략에 장벽들이 되고 있다.
- 정상적인 신경계는 환경 상태에 대한 이전의 경험들을 가지고 그 동작에 관련된 가능성을 지속적으로 평가하고, 운동전략을 단계적으로 변화시킴으로써 갑자기 변화하는 상황에 자연적으로 적응한다. 그러나 신경학적 장애를 가지면 그렇지 못한다.
- 치료사는 환자가 어떤 환경을 피하는 것이 적응력의 부재 때문인지, 제한된 신체 때문에 적당한 대체 방법이 없기 때문인지 아니면 감각 문제 때문인지를 결정해야 한다.
6) 중추조절과 예측적 조절(central set and predictive control)
- 중추조절(central set)이란 곧 일어날 운동들에 대비하여 감각계를 준비하고, 곧 일어날 감각 정보에 대비하여 운동계를 준비시키는 신경계의 능력을 말한다. 신경학적으로 장애를 가진 환자들은 이런 능력이 떨어지기 때문에, 비효율적이고 불안정하게 예측된 운동을 불러일으키게 된다.
5. 균형과 근긴장도 문제
- 신경계 손상에 있어 가장 현저한 장애를 일으키는 2가지는 균형과 근긴장도이다.
1) 균형(balance) - BOS 내에 COG를 유지하고, 신체의 이동 시 평형을 지속적으로 유지할 수 있는 능력
① 신경촉진 모형 : 신장반사(stretch reflex)나 긴장성경반사(ATNR, STNR), 자세반사 기전의 비정상으로 인해 불균형이 일어난다고 본다.
② 과제지향 모형 : 자세조절장애는 다양한 요소들의 상호작용에 의한 장벽들의 결과이다.
2) 근육 긴장도(muscle tone) - 신장되는 것에 대해 근육이 저항하는 힘(근육 자체의 stiffness를 말함)
① 신경촉진 모형 : 과도한 근긴장도나 강직은 고위중추의 억제부족으로 인해 신장반사가 과도하게 항진된 것이다.
② 과제지향 모형 : 과도한 근긴장도는 많은 상호작용을 하는 시스템들 중의 하나가 손상되어 나타나는 일련의 운동 행동의 설정으로 본다.
치료사들은 그들이 일하는 모든 방면의 신경학적 재활과 운동조절에 관한 가정들을 이용한다. 적당한 모델을 선택하고 이용하는 것은 자세와 운동기능장애에 대한 분석과 치료에 있어서 매우 중요하다. 그러나 치료사들은 어느 특정한 모형의 가정이 옳을까를 고민하기보다는, 그들의 가정들의 효용성을 실험하는데 더 집중해야 할 필요가 있다.
“한 모형의 예측적 힘은 그 모형이 완전한가가 아니라, 우세한 조절요소와 그 영향들에 대한 규정이 올바른가에 의존한다. 빈틈없이 정확한 모형보다 불완전한 모형이 더 유용할 수 있다.”
그래서 물리치료에 있어서 모형들은 중요하다. 이전부터 물리치료사들은 신경학적 재활의 변화와 발전의 필요성을 인식해 왔다. 미래는 새로운 문제들에 질문을 던지려는 이들을 위해 있는 것이다.
Reference
김종만 : 신경계해부생리학. 정담, 2004.
김종만, 이충휘 : 신경계 물리치료학. 정담미디어, 2004.
Darcy A. Umphred : Neurological Rehabilitation; 5th edition. MOSBY E*Public, 2010.
Laurie Lundy-Ekman : Neuroscience; Fundamentals for Rehabilitation 4th edition. Elsevier, 2014.
Shumway-Cook, Woollacott : Motor Control; Translating Research into Clinical Practice 5th. Wolters Kluwer, 2019.
'물리치료(PT) > 중추신경계 관련' 카테고리의 다른 글
| 이명에서 벗어나려면..(귀울림, 귀소리) (0) | 2024.06.07 |
|---|---|
| 뇌졸중(Cerebro Vascular Accident; CVA or Stroke)에 대해서 (0) | 2020.11.20 |
| 척수손상(Spinal Cord Injury)이란? (1) | 2020.09.09 |
| 마비의 분류, 마비의 종류 (0) | 2020.07.28 |




댓글